
visionairy®
freespace | collision prevention
Freespace provides fast, vision-based obstacle detection to enable real-time collision prevention for robots across air, land, and water—without the need for active sensors.
Why Freespace | Collision Prevention?
Collision avoidance is a critical requirement for autonomous systems operating in the air, on the ground, or at sea. Freespace offers a passive, vision-based solution that leverages high-speed depth estimation to detect obstacles in real time—without relying on costly or power-intensive active sensors like LiDAR.
Unlike traditional segmentation or object detection methods, Freespace operates deterministically, making it ideal for safety-critical applications. Its optimized algorithm works seamlessly with both monocular and stereo depth inputs, providing a fast, reliable, and scalable path to robust collision prevention across platforms.
Cross-Platform Ready
Lightweight & Efficient
No Manual Labeling Needed
See how it works
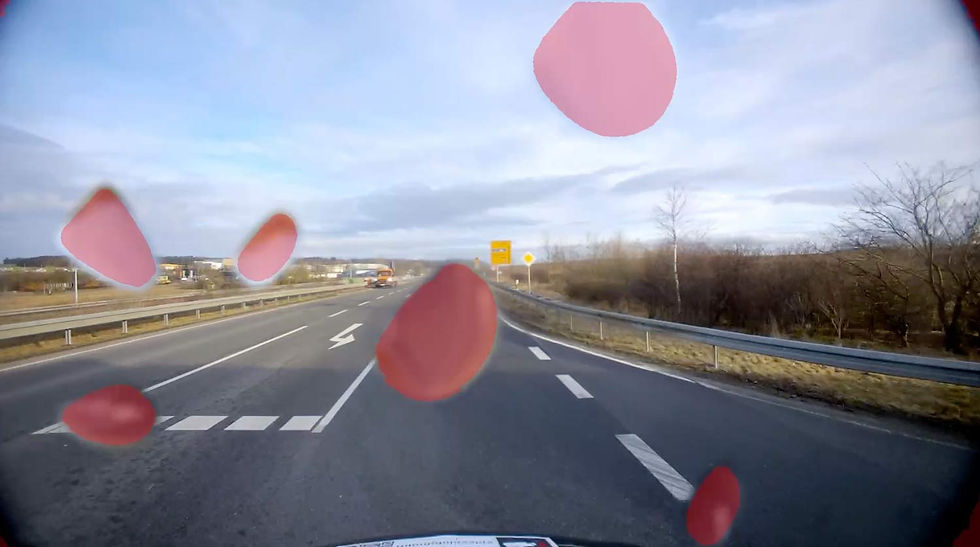
In this example, you can see that even detecting power lines is no problem for our VISIONAIRY® Collision Prevention.


Benefits
Passive Sensing
Relies exclusively on passive sensing for efficient and robust performance.
Enhanced Safety
Offers deterministic behavior, ideal for safety-relevant applications with minimal computing overhead
High Detection Accuracy
Achieves over 99% detection rate in street scenarios when combined with object detection.
Features
Freespace brings fast, reliable collision prevention to any robotic system by leveraging advanced, vision-based depth estimation.
Designed for flexibility, it operates with a wide range of camera configurations and hardware platforms—delivering safe, deterministic performance without the complexity of traditional perception stacks.
Real-Time Obstacle Detection - Rapid, frame-by-frame identification of navigable space using depth data.
Vision-Based & Passive - No need for active sensors — works purely from camera input, reducing cost and power usage.
Deterministic Behavior - Consistent, predictable performance ideal for high-safety applications.
Flexible Camera Compatibility - Can be used with any camera setup, including RGB and IR in mono or stereo configurations.
Hardware Acceleration Ready - Supports deployment on a wide range of embedded and edge devices, leveraging hardware acceleration (e.g., GPUs, NPUs).
No Semantic Labels Required - Eliminates the need for manual annotation or object classification—purely geometry-driven.
Scalable Across Platforms - Designed for use in aerial, ground, and maritime robotics systems.
These performance metrics are for demonstrative purposes only, based on configurations with proven results. Actual performance may vary by setup. Our algorithms are optimized for use with any chip, platform, or sensor. Contact us for details.
accuracy
±5% deviation depending on the used domain
update rate
Up to 100 Hz
initialization time
<10 seconds
Operating Range
Unlimited (environment-dependent)
Supported companion hardware
Nvidia Jetson, ModalAI Voxl2 / Mini, Qualcomm RB5, IMX7, IMX8, Raspberry PI
Basis-SW/OS
Linux, Docker required
Interfaces
ROS2
Input - Sensors
Any type of camera (sensor agnostic)
Input - Data
Dense depth estimation of the camera frame
Outputa - Data
Binary mask of unoccupied pixel that can be mapped to depth estimation
Minimum
Recommended
RAM
2 GB
4 GB
Storage
40 GB
60 GB
Camera
640 x 480 px, 20 FPS
1280 x 720 px, 60 FPS
The information provided reflects recommended hardware specifications based on insights gained from successful customer projects and integrations. These recommendations are not limitations, and actual requirements may vary depending on the specific configuration.
Our algorithms are compatible with any chip, platform, sensor, and individual configuration. Please contact us for further information.



